ホンダは11月2日、独自の協調人工知能を活用し、高精細な地図がなくても自動走行したり、ユーザーの意図を理解して自らの行動が判断できるマイクロモビリティ技術を公開した。同技術を搭載したマイクロモビリティを用いた実証実験を11月から茨城・常総市で開始する。
◆車両と人との2ウェイコミュニケーション
ホンダは『Honda CI』と名付けた独自の協調人工知能を2017年に提唱している。本田技術研究所の先端技術研究所で知能化領域エグゼクティブチーフエンジニアを務める安井裕司氏は「今までのAIはどれもワンウェイの関係であったが、CIは人の意図や行動を理解しながら、もしユーザーのリクエストが正しくなかったり、もう少し良い行動があると判断した場合はCIの方からユーザーに提案し、さらにその提案をユーザーが受け取って、また行動を返すという2ウェイのコミュニケーションができるところが大きな違い」と強調する。
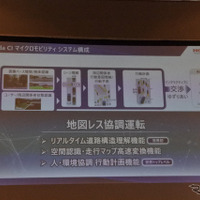
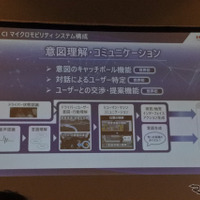
ホンダはその協調人工知能を活用して高精度地図がなくても周りの環境を認識しながら自動走行できる『地図レス協調運転技術』と、対話だけでなくしぐさでもユーザーの意図を理解できる『意図理解・コミュニケーション技術』を確立した。
このうち地図レス協調運転技術について安井氏は「高精度地図を使わずにカメラでダイレクトに走路を認識する。現在の運転支援システムでも白線を認識するシステムはあるが、我々の技術は地図なしで交差点の構造を正確に理解して、そこを曲がっていく。また従来のシステムはあらかじめ決めたルートを選択する形で行動を決めているが、周りの交通参加者の動きをベースに自在にリアルタイムに行動を決めていけるのが特徴」と話す。
一方の意図理解・コミュニケーション技術は「会話のキャッチボールでユーザーまたは周りの交通参加者の意図や行動を理解する。また周りに人がたくさんいてユーザーがどの人かわからない場合でも、瞬時に特徴のある人を選び出してユーザーに問いかけしたり、会話をしながらユーザーを特定することもできる」という。
◆搭乗型と同行型、2種類のモビリティ
これらの技術を活用、搭載した2種類のマイクロモビリティを今回、報道陣らに公開した。ひとつは搭乗型マイクロモビリティ『CiKoMa(サイコマ)』で、「乗りたい所に呼び寄せて、高度な運転支援技術で事故を防止しながら、自由に移動して頂き、行きたい所に着いたらそのまま乗り捨てることができる、便利なモビリティを目指している」と安井氏は解説。
もうひとつはユーザーの特徴を認識し、人ごみの中でも自動走行でユーザーに追従し続けたり、逆に先導することで歩行を支援する『WaPOCHI(ワポチ)』。「ホンダはこれまでモビリティカンパニーとして乗り物を提案してきたが、これは乗り物ではない。人が歩くことをサポートするロボットになる。荷物を持ってあげることで手ぶらでの観光が楽しめたり、高齢者の前で先導して動くことで健康寿命を延ばすことをサポートする」という。
いずれも短距離の人の安全な移動を支援する低速走行の電動モビリティとしての使い方を想定しており、茨城・常総市内でサイコマ、ワポチの技術実証実験を11月から順次開始する。安井氏は「実証実験するルートを拡大し、難易度を上げていきながら技術進化させ、2030年の実用化を目指して開発を進め、その先となる交通事故ゼロ、移動と暮らしの進化へとつなげていきたい」と話していた。