ポルシェは7月2日、子会社のポルシェ・エンジニアリングが、自動運転システムやコネクテッドドライビング機能を検証するために、仮想のテストコースを開発した、と発表した。
昨年4月に新型ポルシェ『カイエン』が発表される前に、プロトタイプは既に400万kmの試験走行を行っていた。しかし、これは実際の道路やオフロードでの走行距離であり、シミュレーションでの仮想試験走行は含まれていない。現在では、実際の試験走行1kmごとに、1000km以上がコンピュータ上で走行されている。エンジニアは車両のデジタルツインを生成し、シミュレーション環境での仮想試験走行を行う。これにより、現実では稀な状況や危険な状況を安全にテストできる。
運転支援システムや高度な自動運転機能の検証には、このような、コーナーケースを無数のバリエーションでテストすることが不可欠という。これにより、仮想道路や環境の重要性が増している。過去には手動で生成されていたシーンやトラックモデルも、現在では自動化が進んでいる。
シーン生成の素材としては、高解像度の地図やポルシェ・エンジニアリングが実施する実際の試験走行データが使用される。公的サービスの地図データは適しておらず、ミリメートル単位の情報が必要なため、国ごとに異なるデータ基盤が重要となる。中国では、特別な法的要件があり、現地チームがプロジェクトを担当する。
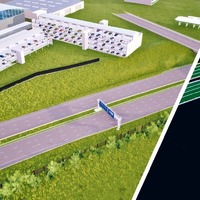
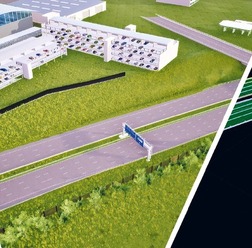
トラックモデルの構築は段階的に行われる。最初に地図データから論理的な道路モデルが作成され、次に3Dモデルが生成される。この仮想試験テストコースは、必要に応じて変更可能で、現実の道路をモデルにすることもできる。ポルシェ・エンジニアリングは、映画業界でも使用される3Dグラフィックスソフトウェア「Houdini」を統合し、リアルな環境を生成している。
しかし、フォトリアリスティックなデジタル道路とその環境のモデリングは非常に時間がかかる。エンジニアは、シミュレーションがスムーズに動作するように、不要なオブジェクトを削除または簡略化する。
ポルシェ・エンジニアリングは、効率的なトラックモデリングのために自動化されたツールチェーンを開発し、品質保証とデータの互換性を確保している。フォルクスワーゲングループのソフトウェア部門のCARIADやAsamと協力し、標準の互換性と品質評価を目指すプロジェクトを進めている。