【GTC Japan 2016】NVIDIAオートモーティブ部門Shapiro氏が語る、同社の自動運転技術実現への取り組み
イベント
イベント情報

Shapiro氏は、自動運転の始まりはビデオゲームであると切り出した。ビデオゲームは20年前の精度の低いポリゴンから、現在ではフォトリアルな高精密なポリゴンモデルへと進化している。レースゲームの分野では、ほぼ実車と変わらない3Dモデルが使用され、物理演算技術を用いて現実の走行に近い動きを実現しているのだ。
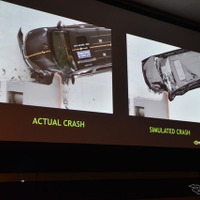
自動車産業でも、このビデオゲームの3Dポリゴン技術が応用されていると同氏は語る。車のデザインを3DCGで描き出すだけでなく、近年では先に述べた現実に非常に近い物理演算技術を使い、ヴァーチャル上で高速時の空力の状況を把握したり、クラッシュテストが行えるのである。
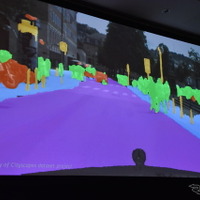
また、自動運転技術で重要となるセンサーやカメラによるイメージの解析や、HDマップの生成にもグラフィックに強いGPUが効果を発揮する。元々ゲーミングPC向けにGPUを供給していたNVIDIAの技術は、自動運転技術にとどまらず、自動車産業の様々な分野で活かされているようだ。
マップに関しては、自動運転車が自動生成するものだけではなく、自動車用の詳細なものが必須となる。その為、NVIDIAは欧州のTomTomや中国のバイドゥといった自動車用マップを手掛ける企業との提携を行っている。今年4月にシアトルで行われた「GTC」では、日本のゼンリンとの提携も発表している。
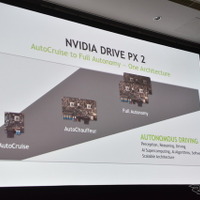
NVIDIAの自動運転技術では、ディープラーニングによるニューラルネットワークが活用されている。搭載されたセンサーやカメラを通して、自動運転車に搭載されたAIが学習していくのである。このAIはスタンドアロンで機能するものではなく、クラウド上に築かれた人の脳に近いニューラルネットワークと自動運転車に組み込まれたスーパーコンピューター「Drive PX 2」が接続されることで、常に学習し続ける自動運転車用AIを実現しているのである。ニューラルネットワークにつながった自動運転車が学習した情報は絶え間なくデータセンターへと送られ、研究者が調整したうえで各自動運転車にフィードバックされていく仕組みだ。
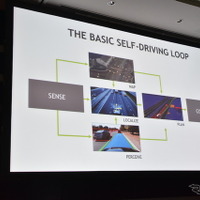
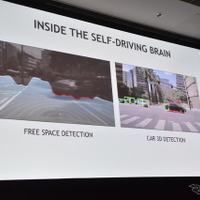
学習した車のAIは、「フリースペース」と呼ばれる最も安全な「道」を自己判断で選ぶ。市街地の整備された道だけではなく、舗装されていない道や草が生い茂った茂みからも適切にフリースペースを判断していくのである。道路標識や車線なども、世界各地のものを学習していくため、調整次第であらゆる国の交通ルールに法った走りが可能だ。
Shapiro氏は、自動運転技術は、人の運転ミスで起こっている車の死亡事故を減らすことができると語る。自動運転技術が一般向けに実用化するまでにはクリアすべき課題が多いが、一つ一つ問題を洗い出して解決していくことが重要であると説明した。NVIDIAは実用化に向け、多くの実験的アプローチも行っている。その一つが4月のGTCで発表した自動運転車のみのフォーミュラレースでもある。数多く行われる取り組みによって、自動運転車という未来の技術は、着々と現実へと近づいているようだ。
《佐藤大介》

この記事の写真


/