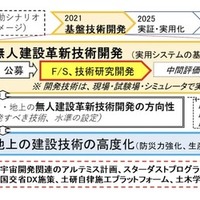
国土交通省は8月8日、宇宙無人建設革新技術開発の実施対象として月面適応のため、自己位置を推定して自動運転する技術開発など、新たに3件を新規に決定したと発表した。
「宇宙開発利用加速化戦略プログラム」(スターダストプログラム)の一環で、宇宙無人建設革新技術開発推進事業として新たに技術研究開発の実施対象とする新規分計3件を決定したもの。
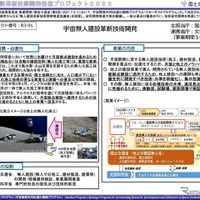
このうちの1件である「月面環境に適応するSLAM自動運転技術の開発」は大成建設とパナソニックアドバンストテクノロジーが取り組む。無人建設を目的として建設機械を制御するためには、正確に機械の位置情報を得る必要がある。測位衛星システムがない月面環境で位置情報を取得るため、自己位置推定とエリアマップの生成を同時に行う「SLAM」と呼ばれる技術を活用する。LiDARで収集したデータから環境情報を活用するSLAM技術と、人工的な特徴点を活用するランドマークによるSLAM技術を統合し、月面のような特殊環境に適応可能な自動運転技術の構築を目指す。
具体的には、月面での自動運転実現には、月面を模した仮想環境での試験やシミュレーションが重要となることから仮想空間上に月面地形を構築し、様々なバリエーションのマーカを配置し、仮想建設機械を走行させる。これによってセンシング性能、自己位置推定性能を検証する。
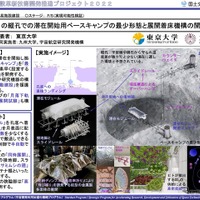
また、新規研究開発するのは他に有人宇宙システムによる「トータル月面建設システムのモデル構築」、東京大学などによる「月の縦孔での滞在開始用ベースキャンプの最小形態と展開着床機構の開発」も決定した。
宇宙無人建設革新技術開発の対象はこれで合計13件となり、技術研究開発を進める。他の宇宙関連事業とも連携し、地上の建設技術の高度化に展開するため、広く宇宙と建設の関係者を募り「遠隔施工等実演会」(仮称)活動も予定している。