【GTC Japan 2016】大学発ベンチャーが仕掛けるオープンプラットフォームによる自動運転技術の加速化
イベント
イベントレポート

以前より自動車にスーパーコンピューターが搭載される未来を想定していたという加藤氏は、大学発のベンチャー企業「Tier IV」を立ち上げ、完全自動運転車の実用実験を行っている。実用化はまだ先が長いとしながらも、技術の方向性が見えてきている現在、どのようなビジネスとして社会に出すかを考える必要があると語る。例として、交通の機能がない地域で活用できれば、モビリティの一部として発展する可能性も期待できる。加藤氏の研究チームは、市街地で自動運転車を速く走らせる検証だけでなく、愛知県の離島の島民に自動運転車で目的地へ移動してもらうなどモニター調査を実施している。また、ソフトバンク傘下のSBドライブとともに、AIを活用した会話アプリ「cocoro Drive」の検証も併せて行っている。
自動運転技術についてはオープンプラットフォームとして競争力を持たせるべきではないと語る加藤氏。海外で配車サービスを展開するUberが独自の自動運転技術に取り組んでいることを例に挙げ、研究を開始するまでに長い時間を要してしまうことや、誰がやっても同じ技術へ行きついてしまうため、オープンプラットフォームとして社会復旧を促したほうが良いとしている。そこで加藤氏の研究チームは、様々なセンサーに対応できる「Autoware」というオープンプラットフォームのソフトを開発した。
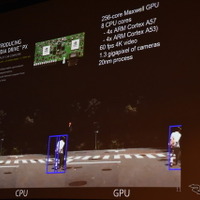
「Autoware」での自動車や歩行者の認識は、CPUよりもGPUモジュールの「Drive PX」を使用したほうが速く、実用性が高いとしている。光によるリモートセンシング技術LIDARを用いることで車の周辺にある物体を把握し、カメラの画像によってそれが何であるかを車は認識するが、これらの技術へはGPUの恩恵が大きい。また、LIDARのセンサーによって生成された3Dマップと実際の地図データをマッチングさせることで。自動運転車の位置を測定することが可能となる。速度や角度といった運動の制約から車の取りうる経路も計算で出せるため、LIDARで周辺を把握し、どの経路が危険であるかを予測することで、リスクが最も低い一本を自動運転車が選び出せるのだとしている。加藤氏は、これはあくまでも数あるアプローチの一つであると説明する。
ディープラーニングを用いた自動運転技術の研究では、自動車教習所の教官に800キロの距離を運転してもらい、その動きをAIに学習させているのだという。人によってタイミングの異なるブレーキの判断も、1、2年学習させることで人間並みの判断ができるようになるのだと語る。しかし、ディープラーニングによるブレーキングは実用化に至っていないため、横断歩道を確実に認識させる「ルールベース」と呼ばれる用法が現段階では効率的であるとしている。
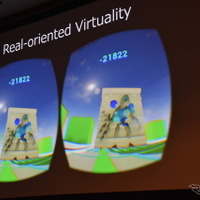
オープン化した技術の中でビジネスとして競争力を持たせるための一つの方法として、加藤氏はVRゲームとの組み合わせを提言した。VR上で自動運転車の動きに合わせたアクションをさせることで没入感の高いゲーム体験ができるというものだが、到着までの間に搭乗者が消費するコンテンツとしても適している。このような他と違ったアプローチのコンテンツが、将来的には自動運転技術において競争力を持ってくるのだとしている。
最後に、加藤氏はヤマハ発動機とともに研究している自動運転車を披露した。「Autoware」を使用したものであるが、「Drive PX」を搭載したオフロードカーを山道で自動走行させることに成功している。この研究は、すでに実用化を目指したフェーズに入っていると説明された。様々な技術が切磋琢磨している段階ではあるが、国内でも自動運転技術の実用化に向けた動きは間違いなく加速している。
《佐藤大介》

この記事の写真





/